
В этом блоге рассматривается тема мерцания, которое можно рассматривать как вопрос качества электроэнергии или электромагнитной совместимости (ЭМС), в зависимости от вашей точки зрения. Мы рассмотрим, могут ли приводы с регулируемой скоростью вызывать мерцание, а также где они могут помочь решить проблему мерцания.
“Мерцание” относится к воздействию на электрическое освещение, когда напряжение питания быстро меняется. Это может быть что угодно, от случайного одиночного провала или вспышки при внезапном подключении или отключении большой нагрузки до раздражающего быстрого мерцания, если напряжение модулируется с частотой в диапазоне, к которому человеческий глаз и мозг особенно чувствительны, что составляет от 0,5 Гц до 20 Гц.
Мерцание иногда путают с гармониками и другими проблемами с качеством электроэнергии. Гармоники по определению находятся на частотах, которые являются целыми кратными частоте источника питания, и они слишком высоки для восприятия глазом. Однако как мерцание, так и гармоническое напряжение вызваны токами нагрузки, влияющими на напряжение из-за импеданса источника питания, поэтому в местах, где импеданс источника питания высок, из-за длинной линии питания или какого-либо другого фактора, проблемы как с гармоническим напряжением, так и с мерцанием могут возникать одновременно.
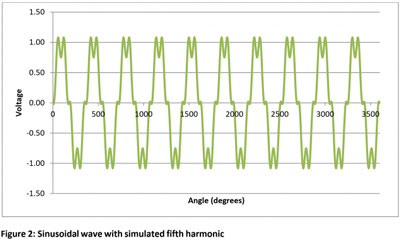
На рисунке 1 показана преувеличенная форма волны с имитацией мерцания на одной пятой частоты питания. В отличие от этого, на рисунке 2 показана смоделированная пятая гармоника. На рисунке 2 каждый цикл искажен, но имеет одинаковую форму, поэтому мерцания не возникает.

Поставщики электроэнергии должны убедиться, что качество их электроэнергии соответствует назначению, и у них есть рекомендации по мерцанию. Как правило, они проводят измерения только в том случае, если есть жалоба, редко проводится какое-либо рутинное тестирование установок, за исключением некоторых специальных систем, таких как ветряные турбины.
Электротехнические изделия, которые производятся в больших количествах, возможно, должны соответствовать стандартам на мерцание. Наиболее известным международным стандартом на продукцию является IEC 61000-3-3, или для Европы EN 61000-3-3, который устанавливает испытания и ограничения для продуктов с номинальным напряжением до 16 А на фазу. В Европейском союзе этот стандарт согласован с Директивой по электромагнитной совместимости, так что оборудование, подпадающее под ее действие, как правило, должно соответствовать ему, чтобы иметь знак CE и быть размещенным на рынке в ЕС. Для номинального тока до 75 А применяется стандарт IEC 61000-3-11. Стандарты имеют строгие ограничения в чувствительном диапазоне частот повторения 0,5 Гц – 20 Гц, но не превышают 25 Гц.
Все стандарты мерцания требуют измерения и оценки, которые учитывают динамическое поведение электрических ламп и чувствительность человеческого глаза и мозга. Кривые мерцания (см. Ниже) основаны на лампочках с вольфрамовой нитью накаливания. Они довольно чувствительны к напряжению из-за квадратичного соотношения напряжения и мощности. С другой стороны, тепловая масса означает, что они имеют тенденцию сглаживать быстрые колебания. Конечно, лампы накаливания сейчас становятся редкостью. Люминесцентные лампы имеют другую характеристику с меньшим эффектом сглаживания. Светодиодные лампы часто имеют регулятор, поэтому на них не влияет напряжение, за исключением случаев, когда они предназначены для использования с диммером. Стандарты могут быть обновлены в будущем, чтобы отразить поведение современных ламп, но затраты на изменения при замене испытательного оборудования и повторном тестировании продуктов нежелательны. Вполне вероятно, что ограничения, основанные на лампах накаливания, сохранятся у нас еще несколько лет.
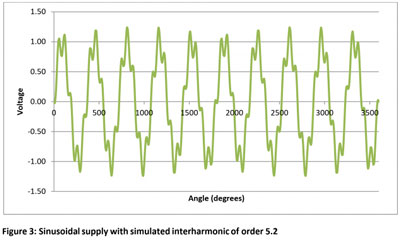
Интергармоники — это нежелательные частоты, которые не являются целыми кратными частоте источника питания, поэтому они лежат между гармониками в спектре. Если они близки к истинной гармонике, то они могут привести к кажущейся модуляции напряжения питания. В простой резистивной нагрузке, такой как лампа накаливания, они не вызывают мерцания, потому что их частота высока, и лампа чувствительна только к текущему среднему напряжению r.m.s. Однако выпрямитель или другая нелинейная нагрузка могут генерировать суммарно-разностные частоты, которые могут включать низкие частоты, если интергармоника близка к целому числу, кратному частоте питания. На рисунке 3 показан пример, где интергармоника имеет порядок 5.2. Пиковая амплитуда заметно модулируется, но напряжение r.m.s. нет, и это не будет измеряться как мерцание. Такого рода форма сигнала может возникать с регенеративными приводами или другими активными контроллерами мощности, где частота переключения не синхронизирована по фазе с источником питания.
Мерцание всегда вызвано изменением тока, потребляемого от источника питания, что приводит к изменению напряжения питания, которое затем влияет на другие нагрузки, включая освещение. Существует множество возможных источников, в приведенном ниже списке приведены некоторые из наиболее распространенных из них.
Единственный способ, которым привод может вызвать мерцание сам по себе, — это пусковой ток зарядки конденсатора при подаче питания. Методы управления приводы сконструированы таким образом, чтобы пусковой ток не превышал номинальный входной ток, поэтому падение напряжения не превышает значения, вызванного нормальной работой при номинальной мощности.
Если привод находится в системе, которая заставляет привод генерировать быстро меняющуюся выходную мощность, то это может вызвать мерцание. Это может быть вызвано запрограммированной периодической работой или предельной стабильностью в контуре управления с обратной связью. Любая система управления должна быть оценена, чтобы убедиться, что она не вызовет чрезмерного мерцания.
В машине с несколькими осями и быстрыми периодическими перемещениями может оказаться возможным организовать управление таким образом, чтобы пики мощности возникали последовательно. Это может умножить частоту мерцания на количество осей, что, если она превысит 25 Гц, может устранить проблему.
Привод полностью устраняет внезапное падение напряжения, вызванное запуском двигателя. Не только частота и напряжение двигателя увеличиваются контролируемым образом, так что ток двигателя ограничен, но и входной ток привода пропорционален выходной мощности, а не выходному току, поэтому входной ток увеличивается только при увеличении скорости двигателя. Существуют области применения, в которых привод целесообразен исключительно из-за его возможности запуска без чрезмерного падения напряжения, если альтернативой является дорогостоящее усиление системы питания.
Пульсирующие нагрузки, такие как поршневые насосы
Накопленная энергия в конденсаторе постоянного тока привода очень ограничена, ее недостаточно для сглаживания цикла мерцания, поэтому, если мощность нагрузки колеблется, входной ток привода колеблется таким же образом. Если не будут приняты специальные меры, привод не будет компенсировать колебания нагрузки.
Обычно привод просто не влияет на уровень мерцания, вызванного пульсирующей нагрузкой, но привод может усугубить этот эффект:
Если необходимо использовать регулирование скорости по замкнутому контуру, лучше всего реализовать преимущественно интегральный контроллер с низким коэффициентом усиления. Таким образом, средняя скорость регулируется точно, но контроллер не сопротивляется естественному периодическому изменению в цикле, вызванному пробуксовкой асинхронного двигателя. Это предположение кажется нелогичным, поскольку мы склонны думать, что привод с регулируемой скоростью обеспечивает быстрое и точное регулирование скорости, но на самом деле быстродействующее управление уменьшает преимущество маховика или другой инерции в накоплении энергии.
Приведенное выше обсуждение применимо к асинхронному двигателю. С двигателем с постоянными магнитами скорость по своей сути строго регулируется, а пульсации крутящего момента непосредственно отражаются как входная мощность без какой-либо возможности проскальзывания ротора, приводящего к некоторому снижению. В привод можно запрограммировать специальный алгоритм управления, который намеренно позволяет скорости динамически снижаться по мере увеличения крутящего момента в течение цикла вращения, сохраняя при этом долгосрочную среднюю скорость на желаемом значении. Это позволяет поддерживать мощность постоянной (мощность = крутящий момент х скорость), и именно мощность определяет входной ток. У Control Techniques есть запатентованное приложение для этого. Возможно, что это может привести к существенной экономии средств при проектировании оборудования в некоторых областях применения, например, многоцилиндровый поршневой насос или компрессор может быть заменен одноцилиндровым.
Мерцание измеряется с помощью “фликерметра”, определенного в стандарте IEC 61000-4-15. Ограничения для оборудования установлены в таких стандартах, как IEC 61000-3-3 и IEC 61000-3-11.
Измерение мерцания связано с колебаниями напряжения питания. Для тестирования продукта тестовая система должна включать имитируемое сопротивление сети, которое определено в стандарте. Ограничения в IEC 61000-3-3 основаны на источнике питания 230 В 50 Гц с импедансом (0,4 + j0,25) Вт, который имитирует очень “слабый” источник питания, т.е. источник с низким током короткого замыкания.
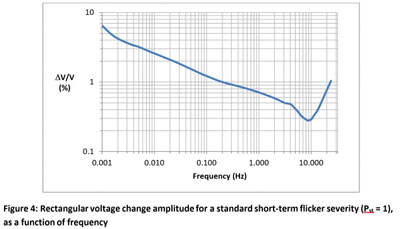
На рисунке 4 показан предел для простых повторяющихся прямоугольных изменений напряжения в соответствии с IEC 61000-3-3 для источника питания 230 В 50 Гц. Ось частот представляет полные циклы в секунду, т.е. каждый цикл состоит из двух равных, но противоположных шагов. Существуют дополнительные правила для оценки других паттернов. На рисунке четко показаны низкие допустимые уровни для критического диапазона частот примерно от 0,5 Гц до 20 Гц.
Мы уже рассмотрели способы, с помощью которых использование привода с регулируемой скоростью может помочь уменьшить мерцание при запуске двигателя или при пульсирующей нагрузке.
Обычные методы включают использование многоцилиндровых поршневых насосов для сглаживания крутящего момента и маховиков.
Там, где большая пульсация мощности неизбежна, подключение источника питания должно быть выполнено электрически близко к месту подачи питания, чтобы избежать падения напряжения в кабелях, совместно используемых с другими нагрузками. Цепи освещения также должны быть отдельно подключены близко к входящему источнику питания.
В крайних случаях может потребоваться установка нового источника питания с более низким импедансом. Ввиду высокой стоимости стоит изучить возможность того, что творческое использование приводов с регулируемой скоростью могло бы избежать затрат.
